线性代数 Linear Algebra
这一章节总结了线性代数的一些基础知识,包括向量、矩阵及其属性和计算方法。
- 线性代数 Linear Algebra
向量 Vectors
性质 Basic rules
- r + s = s + r
- r · s = s · r
- r · (s + t)=r · s + r · t
向量点积 Cosine rule
(r - s)2 = r2 + s2 - 2r · s · cosθ
投影 Projection
标量投影 Scalar projection
| _r · s = | r | × | s | × cosθ_ |
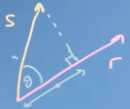
可以通过向量点乘的原理的来理解这一点,假设 r 是在坐标系 i 上的向量( rj=0 )。那么 _r · s = risi + rjsj = risi = r si_ ,其中 _si = s · cosθ_ ,所以 _r · s = r · s · cosθ_
向量投影 Vector projection
s 往 r 上的投影向量如下,同样可以用上图来0解释
转换参考系
向量基变更 Vector change basis
对于在坐标系 (e1, e2) 上的向量 r,把它的坐标点映射到 (b1,b2) ,r 在新的坐标系中的坐标点是
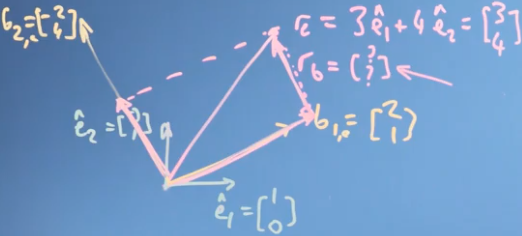
在上面的例子中,$r = \begin{bmatrix} 2 \ 0.5 \end{bmatrix}$.
计算 r 的Python 代码
import numpy as np;
def change_basis(v, b1, b2):
return [np.dot(v, b1)/np.inner(b1,b1), (np.dot(v, b2)/np.inner(b2,b2))]
v, b1, b2 = np.array([1, 1]), np.array([1, 0]), np.array([0, 2])
change_basis(v, b1, b2)
Linear independent 线性无关
如果 r 和 s 是线性无关的,对于任何 α, r ≠ α · s。
Matrices 矩阵
Transformation 矩阵变换
矩阵 E=[e1 e2] 和一个向量 v 相乘可以理解为把 v 在 e1, e2 的坐标系上重新投影
矩阵与旋转角度 θ 之间的关系
转换矩阵为
矩阵秩 Matrix Rank
矩阵 A 的列秩是 A 的线性无关的纵列的极大数目。行秩是 A 的线性无关的横行的极大数目。其列秩和行秩总是相等的,称作矩阵 A 的秩。通常表示为 r(A)或rank(A)。
逆矩阵 Matrix inverse
高斯消元法到找到逆矩阵
\[A^{-1}A = I\]行列式 Determinant
| 矩阵 A 的行列式表示为 det(A) 或 _ | A | _ . |
| 对于矩阵 |
A | =a d-c d_ |
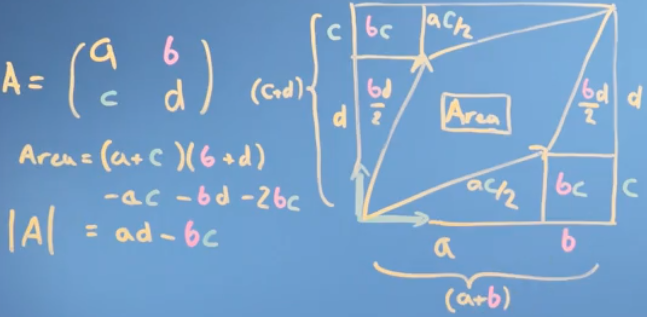
一个矩阵的行列式就是一个平行多面体的(定向的)体积,这个多面体的每条边对应着对应矩阵的列。 —— 俄国数学家阿诺尔德(Vladimir Arnold)《论数学教育》
行列式 det(A) = 0 的方阵一定是不可逆的。
矩阵乘法 Matrix multiplication
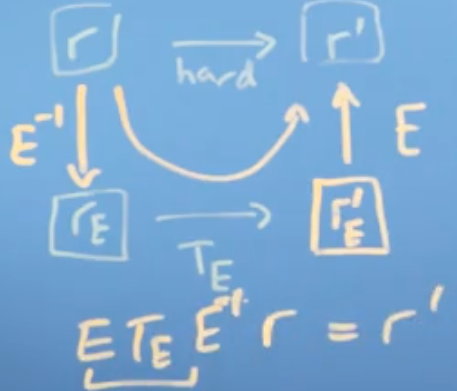
矩阵基变更 Matrices changing basis
对于矩阵 A 和 B , A · B 可以认为是把 B 的坐标系变换到 A 中。
Transform (rotate) R in B’s coordinates: B-1RB
正交矩阵 Orthogonal matrices
正交矩阵是一个方块矩阵 A,其元素为实数,而且行向量与列向量皆为正交的单位向量,使得该矩阵的转置矩阵为其逆矩阵。
如果 A 是正交矩阵,那么 AAT=I , AT=A-1 。
格拉姆-施密特正交化 The Gram–Schmidt process
如果内积空间上的一组向量能够组成一个子空间,那么这一组向量就称为这个子空间的一个基。Gram-Schmidt正交化提供了一种方法,能够通过这一子空间上的一个基得出子空间的一个正交基,并可进一步求出对应的标准正交基。
Gram-Schmidt 正交化过程,它是一个用于将一组向量转化为一组正交(且可能是单位正交)向量的数学方法。简而言之,它提供了通过正交化将一组线性无关的向量转换为正交基的方法
经过上述过程后,对于任何 i, j , βi βj = 0 。(在经过正交化过程后,所有得到的正交基向量之间的点积(内积)为零,意味着它们是正交的。)
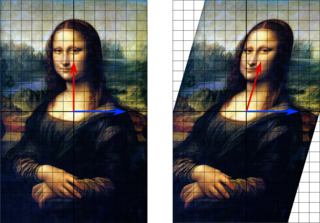
Reflecting in a plane
特征向量和特征值 Eigenvectors and Eigenvalues
对于一个给定的方阵 A,它的特征向量(eigenvector)v 经过这个线性变换之后,得到的新向量仍然与原来的 v 保持在同一条直线上,但其长度或方向也许会改变。 它们满足: Av = λv。
λ 为标量,即特征向量的长度在该线性变换下缩放的比例,称 λ 为其特征值。
在上面这个图像变换的例子中,红色箭头改变方向,但蓝色箭头不改变方向。蓝色箭头是此剪切映射的特征向量,因为它不会改变方向,并且由于其长度不变,因此其特征值为1。
根据线性方程组理论,为了使这个方程有非零解,矩阵 A 的行列式 det(A - λI)=0 必须是零。
例如,矩阵 A 为,那么
λ2-(a+d)λ+ad-bc=0 ,得到 λ 并计算特征向量。
特征值分解(Eigenvalue Decomposition)中的 基变换(Changing the Eigenbasis)
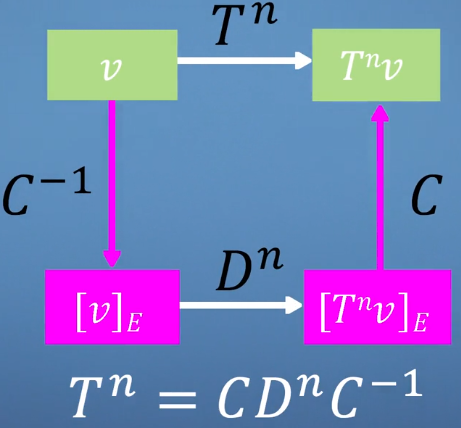
其中,C 是特征向量(eigenvectors),$D$由特征值(eigenvalues)构成.
一个例子:
特征值的属性
如 λ 为 A 的特征值, x 是 A 的属于 λ 的特征向量:
- λ 也是 AT 的特征值;
- λm 也是 Am 的特征值(m是任意常数);
- A 可逆时,λ-1 是 A-1 的特征值;